Sep '23 - Dec '23
Breadth vs Depth - Benchmarking Generalists and Specialists in Robot Agility Learning
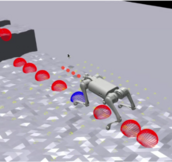
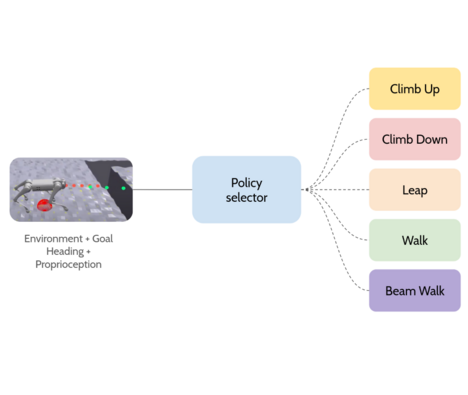
We trained specialist skills like jumping, climbing, and narrow beam walking. I implemented an RL+PPO-based Selector Policy to select the most effective specialist skill in varying environmental conditions. We compared its performance against a generalist policy trained on a combination of all skills.
RoboticsMLReinforcement Learning