Long Horizon Task Planning for Quadruped Robot
Sep '23 - Present
RoboticsMLReinforcement Learning
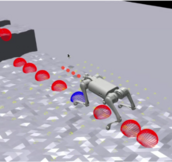
We obtained quadruped controller using curriculum-based learning in Isaac Gym. We collected time & energy costs dataset for local motions and trained cost predictor as a multi-head convolutional NN. We demonstrated long horizon task planning with user-defined objective using A* search guided by the cost predictor.