Siddharth Saha
Robotics & ML Engineer at Tesla. Building intelligent robots that navigate and interact with the real world.
Featured Projects
View all →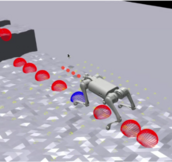
Sep '23 - Present
Long Horizon Task Planning for Quadruped Robot
We obtained quadruped controller using curriculum-based learning in Isaac Gym. We collected time & energy costs dataset for local motions and trained cost predictor as a multi-head convolutional NN. We demonstrated long horizon task planning with user-defined objective using A* search guided by the cost predictor

Sep '22 - Dec '23
Autonomous Quadruped in Unknown Cluttered Terrains
This was my MRSD Capstone Project at CMU with Prof. Sebastian Scherer, AirLab. The MRSD capstone is a three-semester long project with a budget of $5000 from MRSD + funding from sponsors. At the end of the project, our robot was able to explore unknown and cluttered disaster sites to search for trapped humans.
Sep '23 - Dec '23
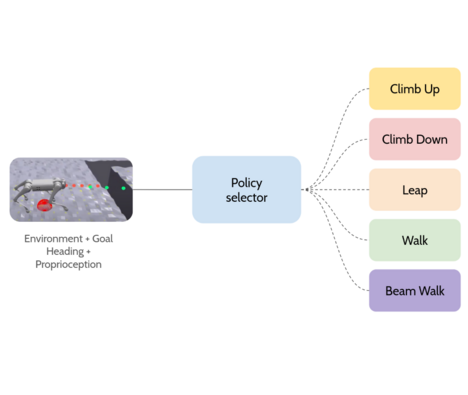
Breadth vs Depth - Benchmarking Generalists and Specialists in Robot Agility Learning
We trained specialist skills like jumping, climbing, and narrow beam walking. I implemented an RL+PPO-based Selector Policy to select the most effective specialist skill in varying environmental conditions. We compared its performance against a generalist policy trained on a combination of all skills.
About Me
I'm a Robotics & ML Engineer at Tesla, working on Optimus — Tesla's humanoid robot. I hold an M.S. in Robotic Systems Development from Carnegie Mellon University and a B.Tech in Mechanical Engineering from IIT Bombay. My work spans motion planning, legged locomotion, computer vision, and reinforcement learning.
More about me →