
Familiarizing with Opensource Robotics Packages (Running Post)
There are two tracks of self-development I have in mind:
- Familiarizing with famous opensource robotic packages — This is to know what’s the best out there by running their example demonstrations, even if I don’t get the maths yet
- Making a library of my own implementations — This is to re-invent the wheels by consolidating the maths and my intuition, attempting to bridge the gap of what I know and what’s out there
This blog attempts to journal my odyssey through the first track.
# First time setup steps
# I will keep referring to ROOT_DIR in the rest of the post
ROOT_DIR=<ASSIGN PREFERRED ROOT DIRECTORY ADDRESS HERE>
cd $ROOT_DIR
mkdir -p opensource_ws/src
cd opensource_ws
# Install catkin-tools: https://catkin-tools.readthedocs.io/en/latest/installing.html
catkin init
catkin build
Table of Contents
Kindr
Summary: The kindr package provides interfaces to standard mathematical quantities encountered in kinematics and dynamics for robotics.
Latest as of: Mar 26, 2023
Compilation Steps
cd $ROOT_DIR
cd opensource_ws/src
git clone https://github.com/ANYbotics/kindr.git
catkin build kindr
Simpletest package
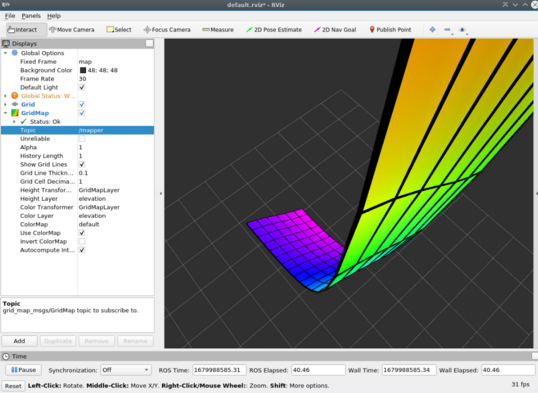
Grid Map
Summary: The grid_map is intended for 2.5-dimensional grid mapping, i.e., heightmaps. It is intended to be used as a local data map and it uses a circular buffer to shift the data as the robot moves.
Latest as of: Mar 26, 2023
Compilation Steps
cd $ROOT_DIR
cd opensource_ws/src
git clone https://github.com/ANYbotics/grid_map.git
catkin build grid_map
Interesting aside here: The grid_map package is a metapackage. The other packages like grid_map_core and grid_map_octomap are where the actual code is implemented. So what’s the difference between a package and a metapackage? I answer it in a short blog post.
Simpletest package
Learned a new aspect of ROS CMakeLists.txt while writing the above simpletest. The grid_map library source code is not accessible even if you include the relevant package names. You have to link to the library using the following code –
target_link_libraries(${PROJECT_NAME}_node
${catkin_LIBRARIES}
)
I created this grid map after figuring out the APIs from grid_map source code —
Elevation Mapping
Summary: The elevation_mapping package creates a local heightmap around the robot. It needs to be provided with range sensor data and robot pose estimation.
Latest as of: Mar 28, 2023
Compilation Steps
- Environment: ROS Noetic
- Packages that I cloned and built in the same workspace:
- kindr
- kindr_ros
- message_logger
- grid_map
- (optional) turtlebot3_simulations
- (optional) turtlebot3
- (optional) point_cloud_io
cd $ROOT_DIR
cd opensource_ws/src
git clone https://github.com/ANYbotics/grid_map.git
catkin build grid_map
Aside — I tried building it on ROS Melodic as well. Melodic fixes below:
- https://github.com/ANYbotics/grid_map/issues/292: Replace
filter_base.hppwithfilter_base.h,filter_chain.hppwithfilter_chain.h - https://github.com/ANYbotics/grid_map/issues/355 They have fixed things in Noetic, not in Melodic. Ended up commenting out the line:
# find_package(TBB 2020.1 EXACT REQUIRED) - https://github.com/ANYbotics/elevation_mapping/issues/151They seem to have fixed this in Noetic, not in Melodic. Changed
PCL_MAKE_ALIGNED_OPERATOR_NEWtoEIGEN_MAKE_ALIGNED_OPERATOR_NEWin elevation_mapping packagePointXYZRGBConfidenceRatio.hpp.
Simpletest package
trunc8/elevation_mapping_simpletest
Legged Control
Summary: The legged_control package is a legged robot control stack based on NMPC (Nonlinear Model Predictive Control) and WBC (Whole Body Controller).
Latest as of: Apr 01, 2023
Compilation Steps
- Environment: ROS Noetic
- Packages that I cloned and built in the same workspace:
- Apt installed
- liburdfdom-dev liboctomap-dev libassimp-dev
cd $ROOT_DIR
cd opensource_ws/src
mkdir legged_control_pkgs && cd legged_control_pkgs
# Clone legged_control
git clone git@github.com:qiayuanliao/legged_control.git
# Clone OCS2
git clone git@github.com:leggedrobotics/ocs2.git
# Clone pinocchio
git clone --recurse-submodules https://github.com/leggedrobotics/pinocchio.git
# Clone hpp-fcl
git clone --recurse-submodules https://github.com/leggedrobotics/hpp-fcl.git
# Clone ocs2_robotic_assets
git clone https://github.com/leggedrobotics/ocs2_robotic_assets.git
# Install dependencies
sudo apt install liburdfdom-dev liboctomap-dev libassimp-dev
catkin config -DCMAKE_BUILD_TYPE=RelWithDebInfo
catkin build ocs2_legged_robot_ros ocs2_self_collision_visualization
Simpletest
source $ROOT_DIR/devel/setup.zsh
roslaunch ocs2_legged_robot_ros legged_robot_ddp.launch