
Project Documentation: Two-Wheeled Self-Balancing Bot
Problem Definition
Demonstrate the inverted pendulum problem using a two-wheeled bot and input from gyroscope+accelerometer module
Components
- MPU 6050
- Arduino Uno
- 2 x N20 12V 120 RPM Micro Metal Gear Motor With Encoder
- 2 x 3PI miniQ Car wheel Tyre 44mm N20 DC Gear Motor Wheel
- Motor driver L298
- Phone box as chassis
- SMPS Power Supply
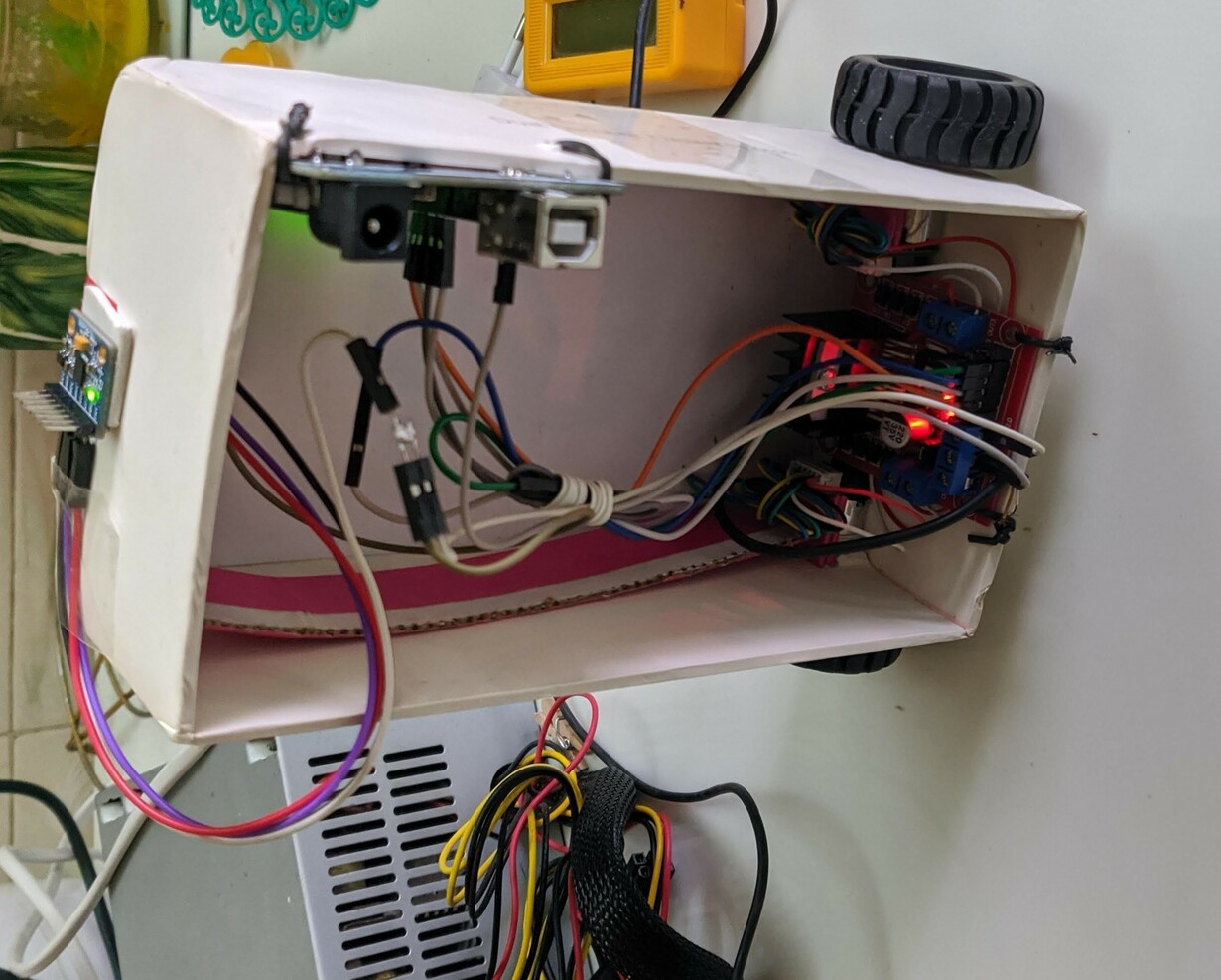
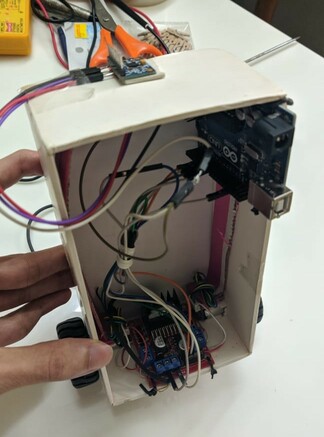
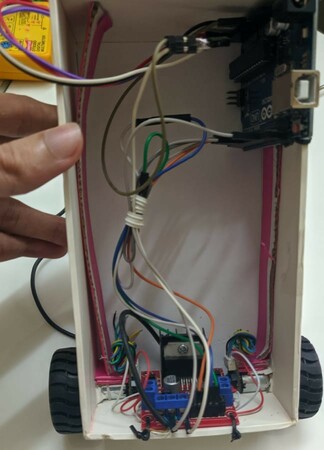
Setup picture
Preliminaries/Learning
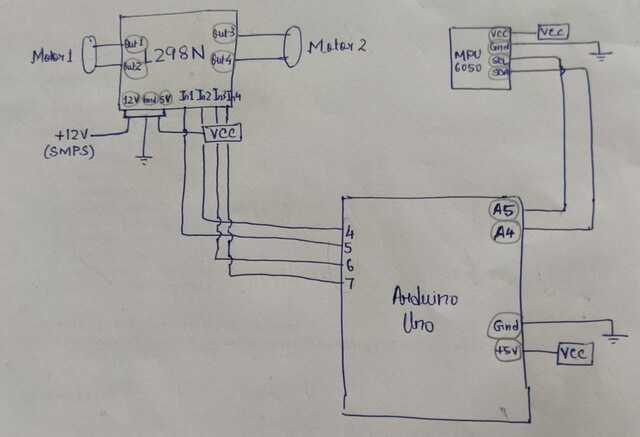
Circuit diagram
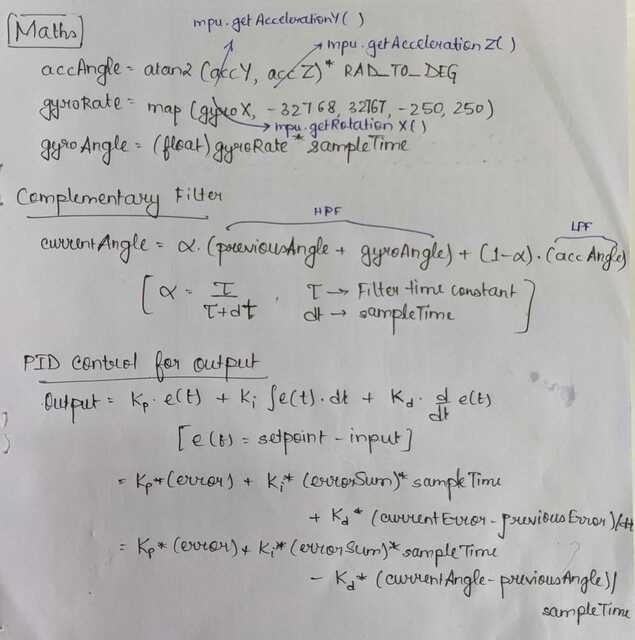
Control equations
Used an SMPS for the first time

Videos
Single motor feedback to tilt
High Kp dance
Cord (Arduino powered through USB cable)
Final Demo: Cordless (Arduino powered by SMPS)
Other Learnings
- Calibrating MPU 6050
- Register level programming